立柱码垛机的工作原理
总体工作原理
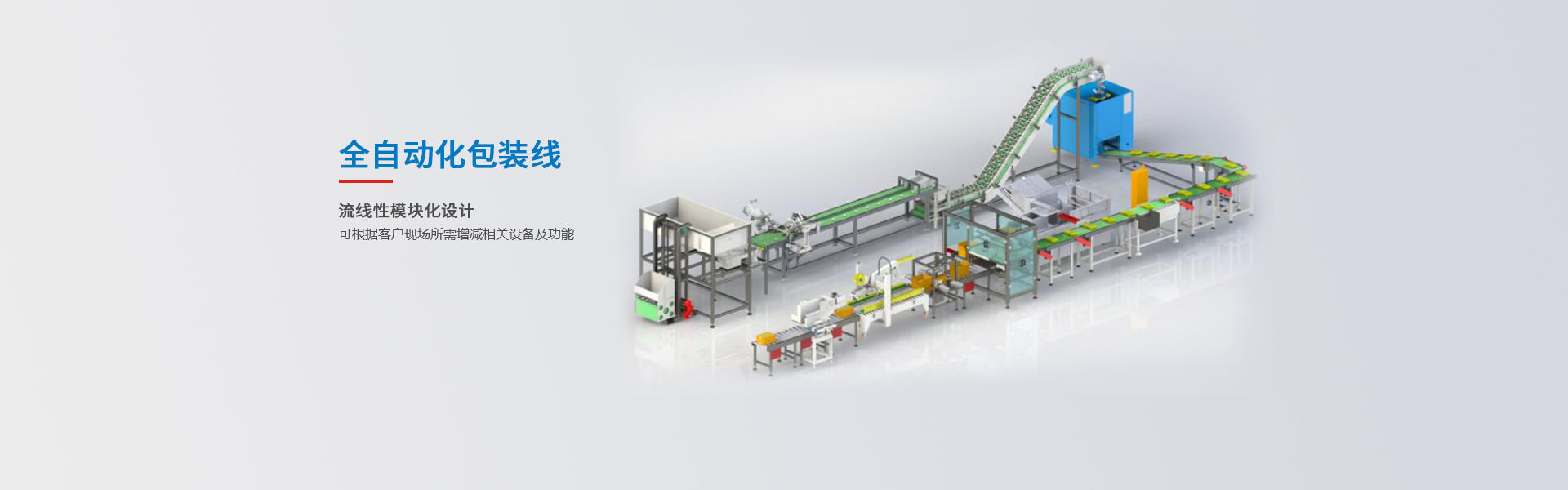
立柱码垛机是一种用于将货物按照特定规则码放到托盘上的自动化设备,它主要基于预设的程序控制和机械运动学原理运行,工作时通过控制系统接收指令,根据预设程序自动完成物料的抓取、搬运和码放,整个过程无需人工干预,能显著提高码垛效率。
各部分工作原理及步骤
感知
立柱码垛机配备了高分辨率相机的机器人视觉系统,该系统可以实时获取图像信息,并进行图像处理和识别,从而快速准确地判断物体的尺寸、形状和位置。同时,机器上的各类传感器,如位置传感器、重量传感器和视觉传感器等,像“眼睛”和“耳朵”一样,感知外部环境的变化,并将这些信息传递给控制系统,以保证码垛过程的精确性和稳定性。
抓取
控制系统作为码垛机的“大脑”,负责接收生产线的信号,并根据预设的程序指令,控制执行机构进行相应动作。控制系统通常由PLC(可编程逻辑控制器)或工控机组成,能够实现复杂的逻辑运算和运动控制。机器人的机械臂根据视觉系统和传感器的识别结果进行运动规划和路径规划,然后立柱码垛机的执行机构发挥作用。执行机构是实现码垛动作的关键,主要包括升降装置、旋转装置、伸缩装置和抓取装置等,它们通过精确的机械运动,精准地抓取货物。比如立柱码垛机的升降机构带动横梁在立柱上上下移动,抓取装置在横梁上水平移动,实现对物料的精确定位和抓取。
堆叠
机械臂抓取货物后,会按照预设的方式进行码放,将已经码放好的货物安全地堆叠在指定位置,完成码垛过程。立柱码垛机器人采用机器人控制系统,实现点位到点位的直线插补,可使运动变得平滑流畅。示教器通过键控和显示功能控制工业机器人运动,能使操作人员顺利实现对变位机运动的示教控制,垛型可以提前预存,后期添加也可灵活操作,工作时按照要求的编组方式和层数,完成对料袋产品等的码垛。
